آیا موتورهای خودران به اندازه کافی ایمن خواهند بود؟
آیا موتورهای خودران به اندازه کافی ایمن خواهند بود؟

شرکتی به نام AB Dynamics اخیراً با نشان دادن سیستم روروک مخصوص بچه ها با اسکوتر BMW C1 خبر داد.
من هیچ اطلاعات دیگری از AB Dynamics ندارم ، و در حالی که امیدوارم آنها با این محصول موفق شوند ، در درجه اول ایمنی من برانگیخته شد.
در ایالات متحده ، موتورسیکلت ها 27 برابر خطرناک تر از وسایل نقلیه مسافری هستند. به طور خاص ، میزان مرگ و میر در هر 100 میلیون مایل مسافت پیموده شده برای موتورسیکلت ها 25 پوند و برای وسایل نقلیه مسافربری کمتر از 1 است.
من مطمئن هستم که عوامل پیچیده ای در زمینه این اعداد وجود دارد ، مانند برخورد موتورسواران با مسافر وسایل نقلیه ، و سواران ناایمن که تجهیزات مناسب (از جمله سوار شدن بدون کلاه ایمنی) استفاده نمی کنند. اما تصور بر این است که رانندگی با موتورسیکلت یا روروک مخصوص بچه ها حداقل نسبت به اتومبیل خطرناک است و به نظر می رسد آمار این امر را تایید می کند.
بنابراین ، بالقوه بودن موتورسیکلت های خودران نسبت به انسان رانندگی ایمن تر است. موتورسیکلت ها می توانند پیشرفت مهمی برای خودروهای خودران و نه فقط برای سواران فعلی باشند. متوسط مصرف سوخت موتورسیکلت ها 44 مایل در هر گالن است ، در حالی که این میزان برای خودروها 23 است. موتورسیکلت ها همچنین فضای کمتری را در جاده اشغال می کنند و احتمالاً کمتر از وسایل نقلیه مسافربری سنگین به جاده آسیب می رسانند. در حقیقت ، احتمالاً 80 miles مایل من در Ford C-MAX (Energi!) اتفاق می افتد و بقیه در حمل و نقل عمومی است. دلیل استفاده نکردن من از موتورسیکلت عمدتا ایمنی است.
همچنین من آموزش دیده یا مجوز نگرفته ام. این مشکل دیگری است که موتورسیکلت های خودران می تواند حل کند.
دنیایی از وسایل نقلیه خودران فوق ایمن ممکن است همچنان به معنای ابزارهای چهارچرخ تک نفره در شهر باشد. انواع افراد و پوشاک و بار به چهارچرخ نیاز دارد. اما وسایل نقلیه خودران فوق ایمن نیز ممکن است به معنای اسکوترهای بیشتری باشد.
چگونه هکرهای باند موتورسیکلت 4.5 میلیون دلار Jeep Wranglers را به سرقت بردند
چگونه هکرهای باند موتورسیکلت 4.5 میلیون دلار Jeep Wranglers را به سرقت بردند
 یک افسر گشت بزرگراه کالیفرنیا نمایش عمومی این هک را ارائه می دهد. عکس توسط Artie Ojeda.
یک افسر گشت بزرگراه کالیفرنیا نمایش عمومی این هک را ارائه می دهد. عکس توسط Artie Ojeda. یک باند موتورسیکلت در جنوب کالیفرنیا راهی برای هک کردن Jeep Wranglers پیدا کردند. تکنیک آنها شامل ایجاد کلیدهای الکترونیکی بود تا بتوانند فقط سوار شوند و رانندگی کنند.
این ممکن است شبیه چیزی از Breaking Bad به نظر برسد ، اما واقعاً اتفاق افتاد. این باند از این تکنیک برای سرقت 150 جیپ استفاده کرد تا سرانجام گرفتار شد. هنگامی که یکی را پیدا کردند که دزدیدن آن آسان به نظر می رسید ، می رفتند و از طریق شیشه جلو آن شماره شناسایی خودرو (VIN) را می خواندند. - حاوی کدهای کلیدی جایگزین برای Jeep Wranglers.
در اینجا ویدئویی از دزدانی است که به سمت جیپ رانگلر می روند و زنگ هشدار آن را خاموش می کنند. ، سپس سوار شدن و رانندگی معمولی - همه در 90 ثانیه.
شما می توانید مقاله کامل در این مورد را اینجا بخوانید.
در اینجا سه پیوند دیگر ارزش وقت شما را دارند:
اندیشه روز:
تصویر روز:

کافه ای با نام توسعه دهندگان. (اعتبار تصویر)
گروه مطالعه روز:
رایگانCodeCamp بوینس آیرس

برنامه نویسی مبارک!
-کوینسی لارسون ، معلم در freeCodeCamp
در صورت کسب ارزش از بین این ایمیل ها ، لطفاً از غیر انتفاعی ما حمایت کنید.
کنترل کننده موتور براش دوگانه می تواند از انواع ورودی های مختلف استفاده کند
کنترل کننده موتور براش دوگانه می تواند از انواع ورودی های مختلف استفاده کند
این احتمال وجود دارد که اگر یک ربات متحرک باشد یا مجهز به اندام های فعال باشد ، دارای موتورهای همراه با یک کنترلر است که به آنها این امکان را می دهد به تعداد زیادی کنترل کننده مختلف برای فعال سازی و حرکت در بازار وجود دارد که هریک نیاز به سیم کشی و برنامه ریزی قبل از دستکاری دارند.
 رندر کنترلر براش پراوین کومار Lyra-5A می تواند از چندین ورودی برای کنترل موتورها استفاده کند. (
رندر کنترلر براش پراوین کومار Lyra-5A می تواند از چندین ورودی برای کنترل موتورها استفاده کند. (
مأموریت خودمختار: فورد با الهام از نسل بعدی مهندسان با دریافت جایزه جدید در FIRST Robotics
مأموریت خودمختار: فورد با الهام از نسل بعدی مهندسان با دریافت جایزه جدید در FIRST Robotics
توسط کریگ استفنس ، مهندس ارشد ، گروه کنترل ، تحقیقات فورد و مهندسی پیشرفته

چیزی که هنوز مرا در مورد راهنمایی دانش آموزان در اولین مسابقه رباتیک شگفت زده می کند این است که چگونه به نظر می رسند بسیار قدیمی تر از آنچه هستند وقتی به صحبت های دانش آموزان با مربیان خود ، بحث در مورد مشکلات و توسعه راه حل ها گوش می دهید ، فکر می کنید که به گروهی از مهندسان باتجربه که در حال بررسی آخرین موانع مهندسی هستند گوش می دهید.
قابل توجه است که اکثر افراد این گروه به سختی 17 سال دارند. این انگیزه است که به پرورش نسل بعدی مهندسان و دانشمندان کامپیوتر کمک کند - و به این فکر کنید که این مردان و زنان جوان چه کار خواهند کرد. یک روز ، احتمالاً زودتر از آنچه فکر می کنیم ، آنها از مهارت های خود برای شکل دادن به فناوری پیشرفته ای که ما روزانه از آن استفاده می کنیم ، استفاده خواهند کرد.
امروزه این دانش آموزان در حال طراحی ، ساخت و آزمایش رباتی با عملکرد کامل هستند. که می تواند مجموعه ای از وظایف پیچیده را انجام دهد - اعم از شلیک توپ تا یک گل تا متعادل سازی خود بر روی یک تیر. این ربات ها سپس با دیگر ربات هایی که توسط جوانان با استعداد توسعه یافته رقابت می کنند.
که توسط دین کامن در سال 1989 تأسیس شد ، FIRST با ترکیب هیجان ورزش با علم و فناوری مهارت های اساسی را به دانش آموزان می آموزد. مسابقات رقابتی و چشم انداز ساخت یک ربات جذاب است ، اما آنها تنها دریچه ای برای اهداف بسیار بلندتر برنامه هستند: الهام بخشیدن به دانش آموزان برای تفکر خلاق و ایجاد علاقه در زمینه های علوم ، فناوری ، مهندسی و ریاضی. در فورد ، ما مفتخریم که بخشی از این تلاش هستیم ، زیرا بیش از 250 نفر از اعضای تیم ما به عنوان مربی در برنامه و با حمایت نزدیک به 80 تیم FIRST دبیرستان خدمت می کنند.
امسال ، ما می خواستیم حتی فراتر رفتن بنابراین ما یک جایزه جدید ایجاد کردیم که در اولین مسابقات قهرمانی در هوستون و دیترویت اهدا می شود. جایزه خودمختار فورد از تیمی که رباتش عملکرد ثابت و قابل اعتمادی را در دوره های مستقل - یا 15 ثانیه اول هر مسابقه نشان می دهد ، تجلیل می کند. من این حقیقت را دوست دارم که دانش آموزان از طریق نحوه حرکت یک روبات به تنهایی شناخته می شوند ، زیرا می دانند که مقابله با این چالش ها به آنها کمک می کند تا در مشاغل عالی - حتی حتی در فورد - کار کنند. به هر حال ، بسیاری از مسائلی که دانش آموزان برای تحویل ربات خودران باید به آن بپردازند شامل همان مشکلات اساسی است که تیم خودروهای خودران ما زمان خود را برای حل آنها صرف می کند.
درست مانند یک وسیله نقلیه خودران ، ربات تیم FIRST قبل از اینکه بتواند کاری انجام دهد باید مجموعه ای از تعیینات را در مورد محیط خود انجام دهد. دانش آموزان باید اطمینان حاصل کنند که ربات خود می تواند خود را در میدان جهت دهد و طبیعت محیط اطراف خود را درک کند ، از جمله جایی که باید برود. در مرحله بعد ، دانش آموزان باید روبات خود را طوری برنامه ریزی کنند که بتواند موانع موجود در سر راه خود را شناسایی کرده و نحوه حرکت در زمینه را برای انجام وظایف خود بفهمد. سپس باید بتواند آن وظایف را انجام دهد و از خطرات پیش بینی نشده احتمالی جلوگیری کند.
داوران از نزدیک نظاره گر هستند ، اما ارزیابی بر اساس همه این عناصر خواهد بود ، لزوماً در مورد کدام ربات بیشترین امتیاز را کسب نمی کند. اولین دانش آموزان نیز روبات های خود را برای یک نمونه برنامه ریزی نمی کنند. آنها در مسابقات متعددی شرکت می کنند ، بنابراین ربات آنها باید بتواند در حالت خودمختار به طور مکرر و قابل اعتماد برای موفقیت عمل کند.
در سالهای آینده انتظار می رود مشاغل مربوط به علوم ، فناوری ، مهندسی و ریاضی همچنان در حال رشد باشد. به طبق آمار دفتر کار ایالات متحده ، بین سالهای 2009 تا 2015 ، تعداد مشاغل STEAM بیش از 10 درصد افزایش یافته است. این میزان برای مشاغل غیر STEAM بیش از دو برابر رشد بود. در آینده ، انتظار می رود که برخی از سریعترین زمینه های STEAM در زمینه علوم کامپیوتر و مهندسی باشد-هر دو زمینه ای که دانش آموزان می توانند در برنامه نویسی و ساخت یک ربات کاربردی تجربه ارزشمندی کسب کنند.
بعنوان مهندس ، گاهی اوقات سخت ترین قسمت راهنمایی یک تیم اول این است که روی دست خود بنشینید و خودتان روبات را مهندسی نکنید - شما باید اجازه دهید دانش آموزان پیش قدم شوند. موفقیت آنها برای خودشان است. ممکن است آنها هنوز در رشته مهندسی تحصیل نکرده باشند ، اما هدایت آنها در مسیری که انتخاب می کنند و تماشای توانایی های آنها واقعاً الهام بخش است. من نمی توانم صبر کنم تا ببینم عملکرد آنها - و روبات های آنها - در سال جاری چگونه است.
برای کسب اطلاعات بیشتر در مورد تلاش های Ford STEAM ، اینجا را کلیک کنید.
کنترل موتورهای DC با استفاده از پایتون با رزبری پای (40 پین)
کنترل موتورهای DC با استفاده از پایتون با رزبری پای (40 پین)
در این آموزش نحوه اتصال دو موتور به رزبری پای خود را به شما نشان خواهم داد. انجام این کار به Raspberry Pi شما امکان می دهد در دنیای واقعی تعامل داشته باشد ، و این امکان را ایجاد می کند که یک روبات بسازد ، در روزهای گرم پنکه را روشن کند یا حتی در حالی که شما دور هستید برای گربه یا سگ خود غذا بخورید.
درباره
ساده ترین راه برای درک نحوه عملکرد این روش با دیدن است. من تعدادی عکس از ساخت سیستم در هر مرحله قرار داده ام. من این کنترل DC Motors را با استفاده از پایتون با آموزش Raspberry Pi دنبال می کنم ، اما مجبور شدم آن را کمی تغییر دهم تا با رزبری پای 40 پین به جای 26 کار کنم. منظور من چیست؟
 قلم به پین هایی در انتهای Raspberry Pi
قلم به پین هایی در انتهای Raspberry Pi قطعات
<اشاره می کند uli> A Raspberry Pi با کارت SD از پیش نصب شده با Raspbianاتصال اولین موتور DC One
اولین گام ها شامل سیم کشی برق از طریق درایور موتور L293 است. با پین 26 یا 40 پین فرقی نمی کند. منبع تغذیه و خروجی همان پین ها هستند. از گوشه سمت راست پایین ، اولی و سومی. در اینجا نقشه طرح بندی است:
 تصویر از https: //business.tutsplus .com/tutorials/controlling-dc-motors-using-python-with-a-raspberry-pi-cms-20051
تصویر از https: //business.tutsplus .com/tutorials/controlling-dc-motors-using-python-with-a-raspberry-pi-cms-20051 در اینجا چند تصویر از تنظیمات کنونی آمده است: "https://cdn-images-1.medium.com/max/426/1*elhfec4TihM9PUR2H8xVZw.jpeg"> 
 src = "https://cdn-images-1.medium.com/max/426/1*N2jrqDfi3GNqHoNZ_lhbNA.jpeg">
src = "https://cdn-images-1.medium.com/max/426/1*N2jrqDfi3GNqHoNZ_lhbNA.jpeg">
بعدی شامل تنظیم GPIO می شود ، این بسته به تعداد تفاوت دارد از پین ها در اینجا شرح هر پین است:

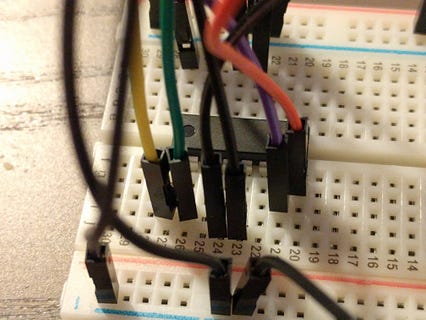
ما از GPIO 23 (پین 16 ، 8 پین بیش) ، GPIO 24 (پین 18 ، 9 پین بیش) و GPIO 25 (پین 22 ، 11 پین بیش) استفاده می کند. مراقب پین زمینی باشید (پین 20). در مدار من ، این ردیف بیرونی پین ها است. شما باید این GPIO ها را به پین های مناسب پله موتور متصل کنید.
من هر سیم را متفاوت رنگ آمیزی کرده ام. بنفش برای GPIO 23 است و به پین 4 در پله موتور متصل می شود. رنگ سبز برای GPIO 24 ، در کنار GPIO 23 است و به پین 2 متصل می شود. رنگ زرد برای GPIO 25 ، یکی دورتر از GPIO 24 و به پین 1 استپر موتور متصل می شود. تصاویری از مدار من در زیر. com/tutorials/controlling-dc-motors-using-python-with-a-raspberry-pi-cms-20051 


اکنون زمان اضافه کردن قدرت است. سیم های نگهدارنده باتری را به نوار مثبت و نوار منفی اضافه کنید. تصاویر زیر.


و آخرین مرحله برای موتور اول ، افزودن موتور واقعی است. این به تنها پین ها (در یک طرف) که پر نشده اند اضافه می شود. در حال حاضر ، سبز به GPIO 24 ، زرد به GPIO 25 ، خالی ، خاموش منفی ، قدرت منفی خالی ، خالی ، بنفش به GPIO 23 و قدرت مثبت وارد می شود.
موتور واقعی با سیم های آسان کار نمی کند. برای اتصال به موتور DC باید سیم را بردارید.

 </pre> <pre># موتورها را آنقدر قابل مشاهده اجرا کنید
برای i در محدوده (0،150):
motor1.clockwise () </pre> <pre> l293d.cleanup () </pre> <p> سپس باید موتور DC را بشنوید. برای اطمینان از روشن بودن موتور می توانید محدوده حلقه for را افزایش دهید. من خودم را به 1500 تغییر دادم. </p> <p> اگر مدار شما کار نمی کند ، اتصالات همه سیم ها را بررسی کنید و مطمئن شوید که پین های GPIO صحیح را دارید. </p> <h4> افزودن موتور دوم </h4> <p> افزودن موتور دوم به این مدار شامل اتصال به طرف دیگر درایور موتور می شود. این شبیه طرف اول است و سه GPIO را به برخی از پین ها وصل می کند. </p> <p> شما باید دو پین وسط (13 ، 12) را به ریل منفی متصل کنید. مرحله بعدی اتصال GPIO 17 (پین 11) ، GPIO 27 (پین 13) و GPIO 22 (پین 15) به پله موتور است. GPIO 22 به پین 9 (بالا سمت راست) در پله موتور متصل می شود. این یکی از سیم های سبز رنگ در عکس های زیر است. GPIO 27 به پین 10 در پله موتور متصل می شود. این سیم آبی در تصاویر زیر است. آخرین اتصال ، GPIO 17 به پین 15 در پله موتور (دوم به بالا سمت چپ). </p> <img src = )
 https://cdn-images-1.medium.com/max/426/1*wCuZD_N1AN2SGDMHC2smCw.jpeg">
https://cdn-images-1.medium.com/max/426/1*wCuZD_N1AN2SGDMHC2smCw.jpeg">آخرین مرحله از دست رفته موتور است. ما باید موتور DC را به مدار اضافه کنیم. این شبیه موتور اول است که دو سیم را جدا کرده و آنها را در فضاهای باز قرار می دهد. در اینجا یک نمودار
 تصویر از https: //business است. tutsplus.com/tutorials/controlling-dc-motors- using-python-with-a- -spberry-pi--cms-20051
تصویر از https: //business است. tutsplus.com/tutorials/controlling-dc-motors- using-python-with-a- -spberry-pi--cms-20051نمودار 26 پین است. Raspberry Pi من 40 پین دارد بنابراین همان پین ها نیست.
 < /img>
< /img> 
مرحله بعدی شامل کد نویسی است. SSH را به pi خود برگردانید و یک فایل .py (Python) جدید ایجاد کنید.
l293d.driver را به عنوان l293d
وارد کنید# موتور 2 از پین 15 ، پین 13 ، پین 11 استفاده می کند motor2 = l293d.motor (15،13،11)
# موتورها را تا حد قابل مشاهده اجرا کنید برای i در محدوده (0،1500): motor2.clockwise ()
l293d.cleanup ()
این باید فقط موتور دوم را اجرا کند. برای اجرای هر دو موتور ، اسکریپت ها را ترکیب کنید (فقط کافی است یکبار کتابخانه را وارد کنید). ) motor2 = l293d.motor (15،13،11)
برای i در محدوده (0،10): موتور 1. در جهت عقربه های ساعت () motor2.clockwise ()
l293d.cleanup ()
بیشتر
در اینجا مطالب مرتبط بیشتری وجود دارد








